Pemenang Electrical Engineering Awards 2004, PUFF-SF: Robot Pemadam Api Berkaki Enam

konfigurasi minimum robot PUFF-SF.

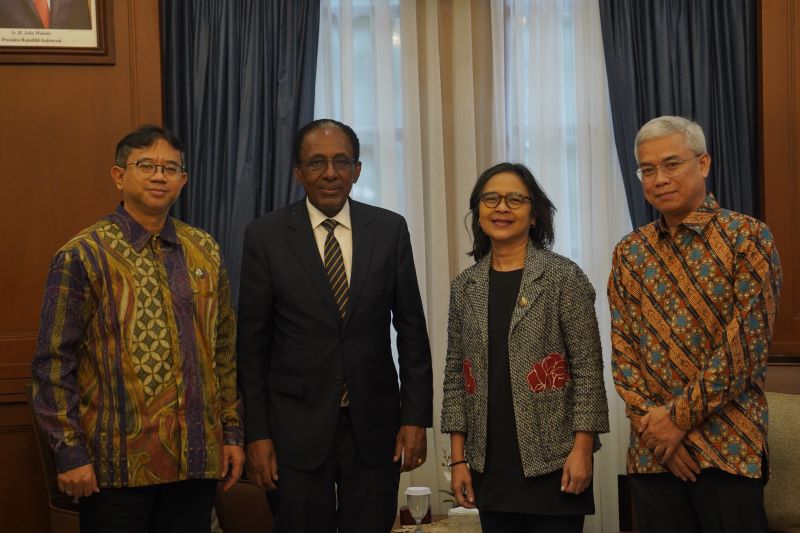
Robot PUFF-SF lengkap dengan tiga sensor dan kipas; siap memadamkan api
Hasil karya pemenang utama Electrical Engineering Awards (EEA) 2004 adalah PUFF-SF, sebuah robot berkaki enam yang berfungsi memadamkan api. Kondisi tantangan yang mampu dilewati robot dengan tiga sensor serta sebuah kipas ini mirip dengan kualifikasi Kontes Robot Cerdas Indonesia (KRCI). Robot diharuskan mencari sumber api –berupa lilin-, mendekatinya, dan memadamkannya. Hanya saja, kalau dalam KRCI, robot diharuskan melewati rintangan berupa labirin; sementara itu, PUFF-SF belum mampu. “Kami akan berusaha mengembangkannya agar performance-nya lebih baik lagi!” tutur Albertus Hendrawan (21).
Robot ini sebenarnya merupakan kelanjutan ide enam mahasiswa Elektro yang bertekad ikut KRCI 2004 (Maret 2004). Sayangnya, proposal mereka gagal. Namun, walaupun begitu, mereka tetap melanjutkan proyek ini. Untunglah, beberapa bulan kemudian (Juni 2004), Himpunan Mahasiswa Elektro mengadakan 3-E, yang salah satu event-nya adalah EEA (silahkan baca artikel sebelumnya mengenai triple-e dan EEA). Segera tim ini melaju kencang dengan proposalnya yang berjudul Robot Heksapod Cerdas Pemadam Api hingga meraih prestasi sebagai pemengan unggulan EEA kategori control and instrumentation serta meraih pemenang utama EEA 2004. Keenam anggota tim ini, yaitu Albertus Hendrawan (21), Vincentius Billy Saputra (21), Daud Elia (21), Wihartantyo Ari Wibowo (24), Liustony (21), dan Hasan (21). Nama robot ini, PUFF adalah singkatan dari Programmable Unmanned Fire-Fighter; sedangkan SF untuk mengenang Sigit Firmansyah, pendahulu tim ini.
Kondisi tantangan robot ini adalah sebidang lantai cukup luas berwarna hitam dan terdapat lilin yang berada pada lingkaran lantai yang telah dicat putih. Prioritas pertama robot ini adalah mencari sumber api (berupa lilin) melalui sensor api yang bekerja berdasarkan pemindaian panjang gelombang api (180-260 nm). Radius pemindaian sensor api ini hingga enam meter. Lingkungan sekitar robot yang berupa lingkaran beradius enam meter dibagi menjadi tiga bagian busur lingkaran, masing-masing 120 derajat. Pertama, robot akan mendeteksi wilayah pertama, yaitu 120 derajat wilayah depan robot. Jika tidak ditemukan api, maka robot berputar counter-clockwise, ke 120 derajat pada wilayah kedua, dan juga selanjutnya ke wilayah ketiga.
Begitu hasil pemindaian menemukan api, robot akan berjalan menuju arah api tersebut, berdasarkan sensor inframerah pendeteksi hitam-putih. Selama lantai masih berwarna hitam, artinya jarak api masih jauh, maka robot akan terus berjalan. Begitu lantai memasuki zona lantai berwarna putih (artinya sudah mendekati sumber api), robot akan berhenti. Lalu, robot akan melakukan pemindaian lagi untuk menentukan secara tepat posisi sumber api. Setelah itu, robot akan memperbaiki posisinya hingga kipas robot persis berada pada arah api. Selanjutnya, kipas akan otomatis berputar untuk memadamkan api.
Robot yang digerakkan oleh 24 baterai rechargeable @1,2 volt ini mampu menghindari rintangan karena juga dilengkapi oleh sensor barrier yang mendeteksi rintangan dan jaraknya.
“Target selanjutnya adalah KRCI 2005!” ungkap Albertus dengan optimis.
Krisna Murti (153 03 021)
Update 14/12/04 17.45 pm

scan for download